

Ingeniería de visión artificial
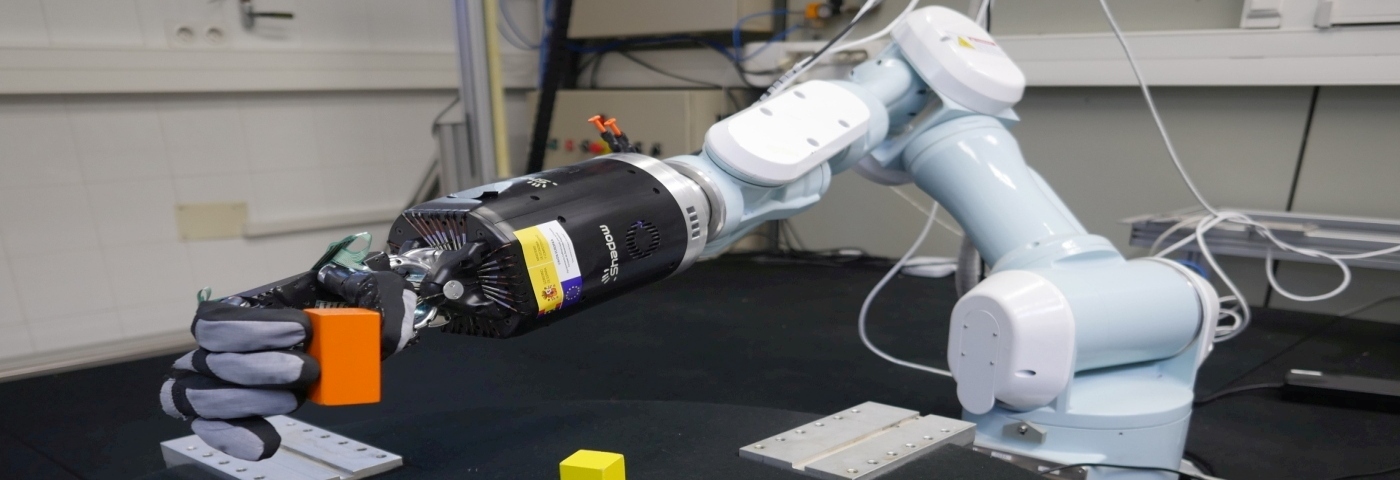
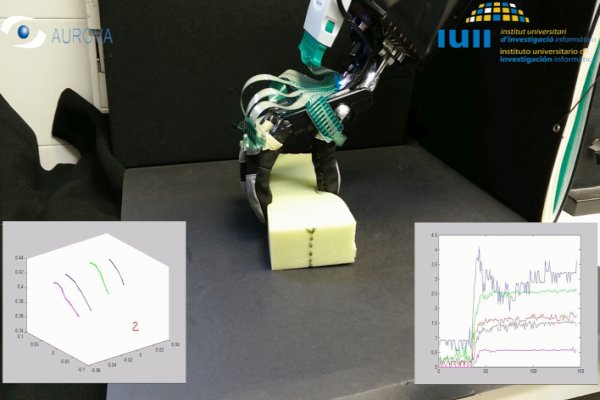
Manipulación robótica inteligente

Control visual de robots

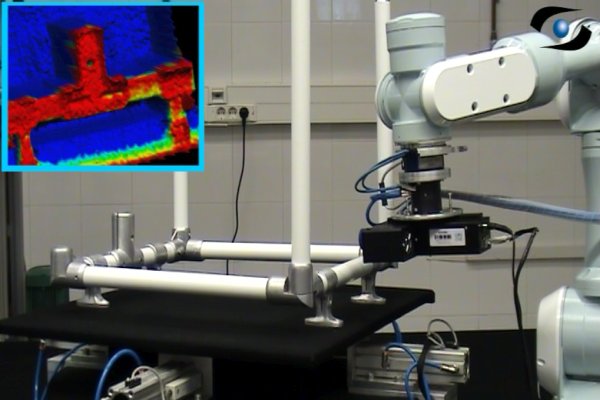
Robots de campo autónomos

Interfaces electromiográficos

Laboratorios virtuales y remotos



Últimas noticias
 Grupo de Automática, Robótica y Visión Artificial
Grupo de Automática, Robótica y Visión Artificial
El grupo de AUtomática, RObótica y Visicón Artificial (AUROVA), desarrolla labores de investigación en la Universidad de Alicante (UA) desde su creación en el año 1996, principalmente dentro de proyectos I+D+i, financiados tanto con subvenciones de convocatorias públicas como a través de contratos con empresas. Los resultados de estos proyectos se reflejan tanto en la producción científica, como en aplicaciones concretas para la industria regional. Todos los proyectos realizados en los últimos años han sido liderados por investigadores del grupo, y la mayoría están financiados por convocatorias públicas competitivas nacionales o europeas.
El grupo AUROVA esta compuesto de forma estable por cuatro profesores funcionarios (un catedrático de universidad, y tres titulares de universidad), además de dos profesores asociados, e investigadores predoctorales. Estos profesores también desempeñaron un papel importante en la puesta en marcha del Grado en Ingeniería Robótica de la UA, en el que los miembros del grupo imparten su docencia principalmente, de forma que la labores de docencia e investigación están muy relacionadas. Así mismo, los investigadores doctores del grupo también participan en el Programa de Doctorado en Informática de la Universidad de Alicante.
Líneas de investigación
Pulse sobre las líneas de investigación para ver una información más detallada de los temas que incluyen.
Ingeniería de visión artificial
- Procesamiento de imágenes, visión en color y morfología matemática.
- Inspección industrial automatizada.
- Visión y reconocimiento 3D. Sistemas RGBD y ToF.
- Reconocimiento y seguimiento de objetos. Reconocimiento en nubes de puntos.
- Clasificación de Imágenes áreas y de satélites.
- Detección y localización de objetos, manchas de fuel y personas en entornos marítimos, a partir de imágenes aéreas.
Manipulación robótica inteligente
- Agarre y manipulación diestra.
- Gestión de estabilidad del agarre y detección de deslizamientos.
- Reconocimiento táctil y manipulación de objetos elásticos.
- Manipulación basada en aprendizaje.
- Manipulación asistida por visión.
- Cooperación entre manipuladores robóticos.
Control visual de robots

- Control visual y control visual-fuerza-tacto.
- Guiado de manipuladores y robots autónomos mediante visión.
- Seguimiento de trayectorias.
- Control visual directo e indirecto, basado en imágen y basado en posición.
Robots de campo autónomos

- Vehículos aútonomos para robótica de campo.
- Navegación en entornos interiores y exteriores.
- Navegación en entornos dinámicos o no estructurados.
- Sensores de rango y SLAM. Fusión de SLAM y GNSS.
- Comportamientos reactivos.
- Interacción segura humano-robot.
Interfaces hombre-máquina electromiográfico

- Análisis e interpretación de señales electromiográficas.
- Operación de robots a partir de control mioeléctrico.
- Teleoperación con interfaces hombre-máquina avanzados.
- Aplicaciones de robotica asistencial.
Laboratorios virtuales y remotos

- Simulación de sistemas robóticos.
- Teleoperación de robots y otros automatismos.
- Interfaces hombre-máquina.
- Nuevas tecnologías en la enseñanza de la Automática.
- Aprendizaje colaborativo mediante internet.
Agradecemos la financiación de nuestra investigación a:


